





 返回
返回- 核心技術
- 以原創技術體系為根基,SenseCore商湯AI大裝置為核心基座,布局多領域、多方向前沿研究,
快速打通AI在各個垂直場景中的應用,向行業賦能。
- 01跨平臺的輕量級 AR/VR 引擎
- 02光照估計
- 03實時稠密三維重建
- 04運動恢復結構(SfM)
- 05位置定位與地圖構建(SLAM)
- 06平面/三維物體的識別與跟蹤

02 / 06
光照估計
從圖像中估計出真實場景的光照環境,可用于虛擬物體的真實感渲染。

03 / 06
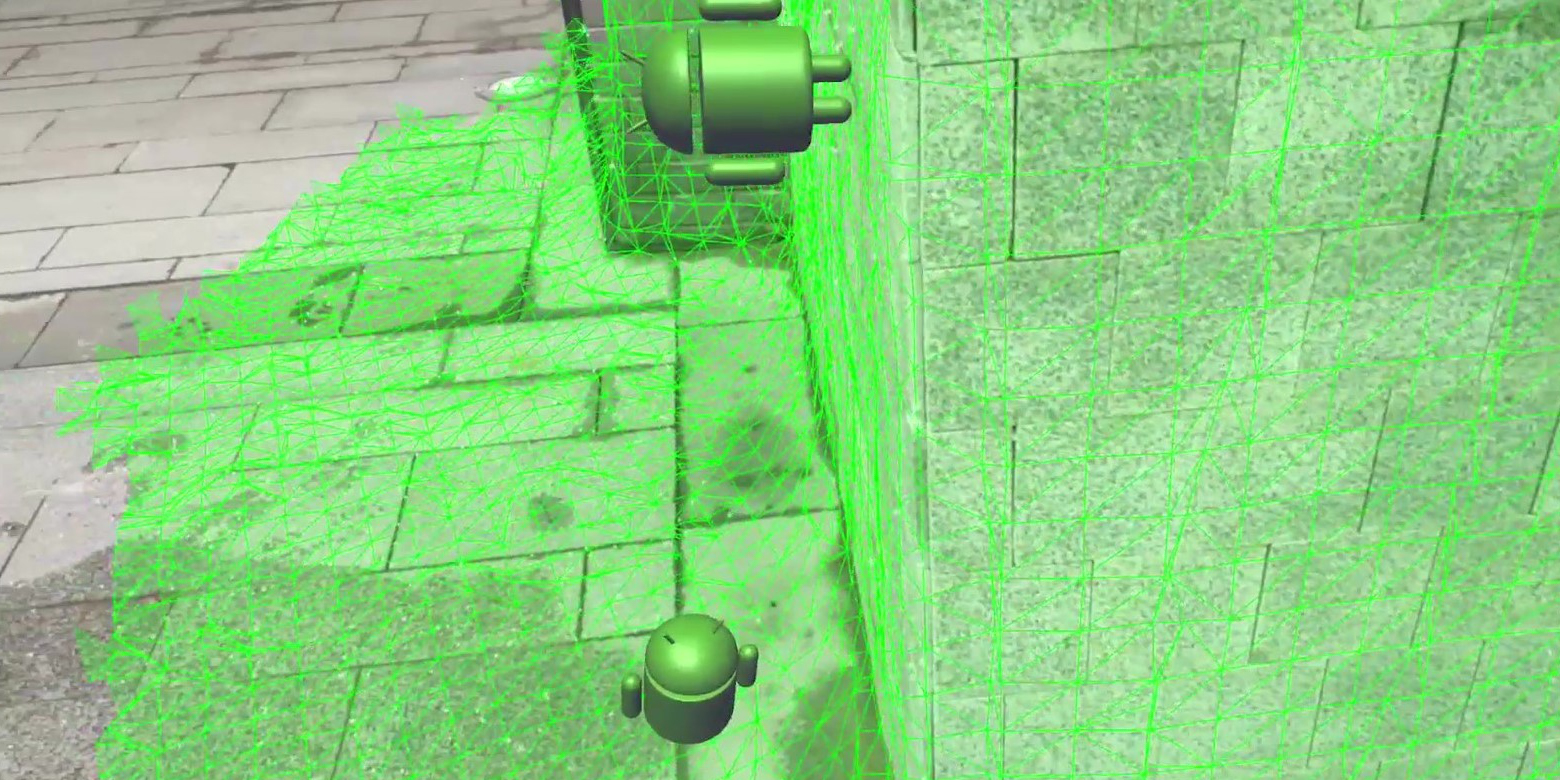
實時稠密三維重建
可實現在線恢復自然場景的稠密三維模型,在移動設備上支持實時的場景虛擬三維數字化、真實感渲染、陰影合成等虛實融合效果,以及虛實物體的遮擋和碰撞等交互效果,創建物理真實的“虛實融合”世界。
04 / 06
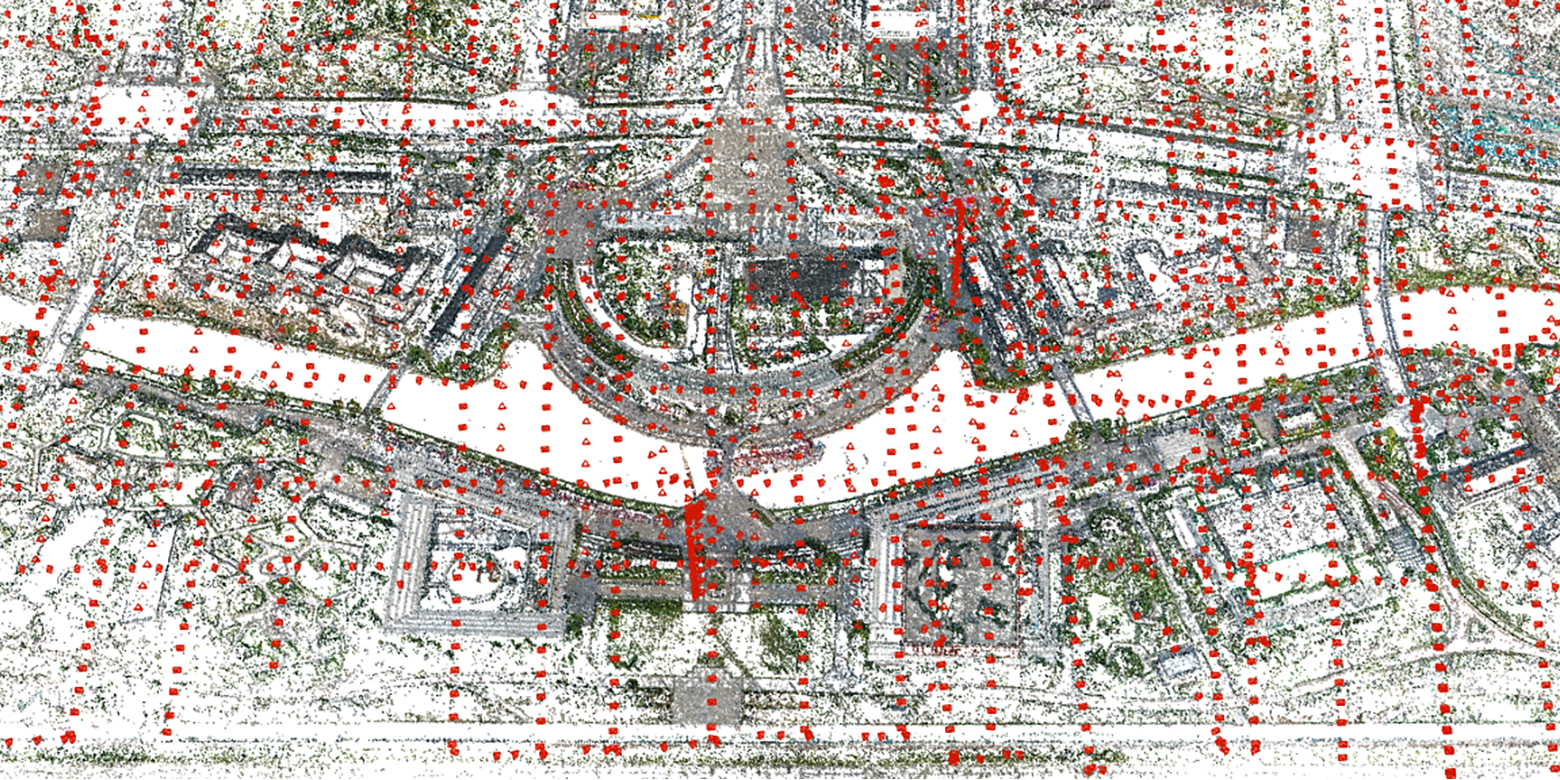
運動恢復結構(SfM)
支持海量的圖片或視頻序列的相機運動參數和場景三維結構的恢復,可實現照片旅行和三維漫游等應用。
05 / 06
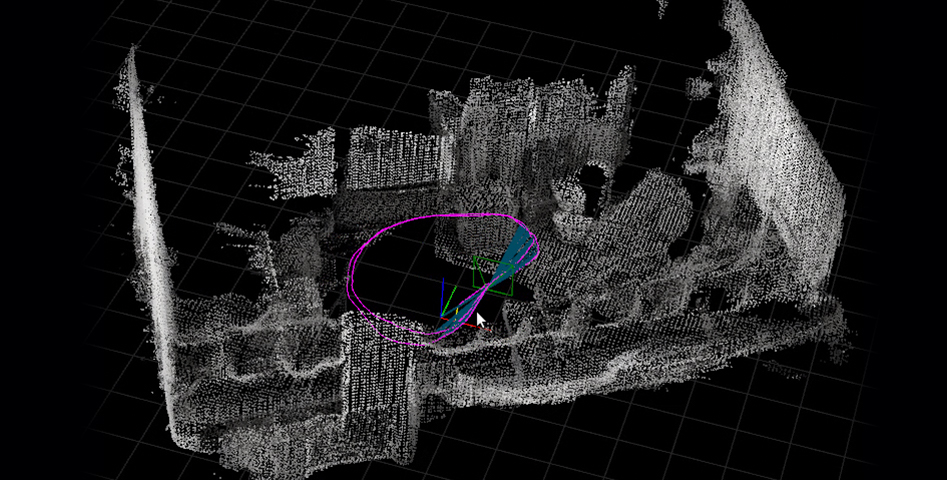
位置定位與地圖構建(SLAM)
通過自主研發的視覺慣導 SLAM 系統,能夠實時跟蹤設備的三維空間位置。同時,構建場景的三維幾何地圖,支持移動平臺的實時定位和虛擬物體植入,達到完美的“虛實融合”效果。
06 / 06
平面/三維物體的識別與跟蹤
基于業內領先的圖像識別和跟蹤技術,能夠快速識別場景中的平面/三維物體,并實現穩定跟蹤。

02 / 06
光照估計
從圖像中估計出真實場景的光照環境,可用于虛擬物體的真實感渲染。
03 / 06
實時稠密三維重建
可實現在線恢復自然場景的稠密三維模型,在移動設備上支持實時的場景虛擬三維數字化、真實感渲染、陰影合成等虛實融合效果,以及虛實物體的遮擋和碰撞等交互效果,創建物理真實的“虛實融合”世界。
04 / 06
運動恢復結構(SfM)
支持海量的圖片或視頻序列的相機運動參數和場景三維結構的恢復,可實現照片旅行和三維漫游等應用。
05 / 06
位置定位與地圖構建(SLAM)
通過自主研發的視覺慣導 SLAM 系統,能夠實時跟蹤設備的三維空間位置。同時,構建場景的三維幾何地圖,支持移動平臺的實時定位和虛擬物體植入,達到完美的“虛實融合”效果。
06 / 06
平面/三維物體的識別與跟蹤
基于業內領先的圖像識別和跟蹤技術,能夠快速識別場景中的平面/三維物體,并實現穩定跟蹤。

